7. Partial Differential Equations#
References:
Svein Linge & Hans Petter Langtangen: Programming for Computations – Python. Springer (2016).
Chapter 5: Solving Partial Differential Equations
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
Partial derivative#
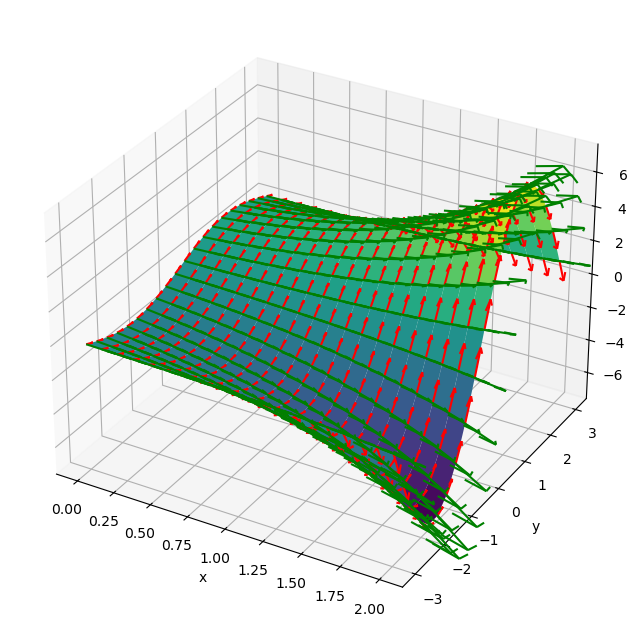
For a function with multiple inputs \(f(x_1,...,x_n)\), a partial derivative is the derivative with respect to an input \(x_i\) while other inputs are held constant.
For example, for
partial derivatives are
x, y = np.meshgrid(np.linspace(0, 2, 20), np.linspace(-3, 3, 20))
f = np.exp(x) * np.sin(y)
dfdx = np.exp(x) * np.sin(y)
dfdy = np.exp(x) * np.cos(y)
# 3D plot
fig = plt.figure(figsize=(8, 8))
ax = fig.add_subplot(projection='3d')
ax.plot_surface(x, y, f, cmap='viridis')
x0 = np.zeros_like(x)
x1 = np.ones_like(x)
ax.quiver(x, y, f, x1, x0, dfdx, color='g', length=0.2)
ax.quiver(x, y, f, x0, x1, dfdy, color='r', length=0.2)
plt.xlabel('x'); plt.ylabel('y');
Partial Differential Equation (PDE)#
A partial differential equation (PDE) is an equation that includes partial derivatives
of an unknown function \(f(x_1,...,x_n)\).
A typical case is a function in space and time \(y(x,t).\)
A simple example is the diffusion equation (or heat equation)
that describes the evolution of concentration (or temperature) \(y\) in space \(x\) and time \(t\) with input \(g(y,x,t)\) and the diffusion coefficient \(D\).
Analytic Solution of PDE#
For a diffusion equation without input
the solution is given by separation of variables.
By assuming that the solution is a product of temporal and spatial components \(y(x,t) = u(t) v(x)\), the PDE becomes
For this equation to hold for any \(t\) and \(x\), a possible solution is for both sides to be a constant \(C\). Then we have two separate ODEs:
for which we know analitic solutions.
By setting \(C=-b^2\le 0\), we have
Thus we have a solution
where \(b\), \(C_1\) and \(C_2\) are determined by the initial condition \(y(x,0)\).
The equation tells us that higher spatial frequency components decay quiker.
Boundary condition#
For uniquely specifying a solution of a PDE in a bounded area, e.g., \(x_0<x<x_1\), we need to specify either
the value \(y(x,t)\) (Dirichlet boundary condition)
or the derivative \(\frac{\partial y(x,t)}{\partial x}\) (Neumann boundary condition)
at the boundary \(x_0\) and \(x_1\) to uniquely determine the solution.
From PDE to ODE#
The standard way of dealing with space and time on a digital computer is to discretize them. For a PDE
defined in a range \(x_0 \le x \le x_0+L\), we consider a spatial discretization by \(\Delta x = L/N\)
\((i=0,...,N)\) and
The derivative of \(y\) with respect to \(x\) at \(x=x_i\) can be approximated by
or
The second order derivative is approximated, to make it symmetric in both directions, as
Then the PDE can be approximated by a set of ODEs
Euler method#
First, let us solve the converted ODE by Eulre method.
def euler(f, y0, dt, n, args=()):
"""f: righthand side of ODE dy/dt=f(y,t)
y0: initial condition y(0)=y0
dt: time step
n: iteratons
args: parameter for f(y,t,*args)"""
d = np.array([y0]).size ## state dimension
y = np.zeros((n+1, d))
y[0] = y0
t = 0
for k in range(n):
y[k+1] = y[k] + f(y[k], t, *args)*dt
t = t + dt
return y
The second order derivative can be computed by shifting the array \(y\) to left and right, and subtracting double the original array.
def diff1D(y, t, x, D, inp=None):
"""1D Diffusion equaiton with constant boundary condition
y: state vector
t: time
x: positions
D: diffusion coefficient
input: function(y,x,t)"""
dx = x[1] - x[0] # space step
# shift to left and right and subtract, with both ends cut
d2ydx2 = (y[:-2] -2*y[1:-1] + y[2:])/dx**2
# add 0 to both ends for Dirichlet boundary condition
d2ydx2 = np.hstack((0, d2ydx2, 0))
if inp == None:
return D*d2ydx2
else:
return D*d2ydx2 + inp(y, x, t)
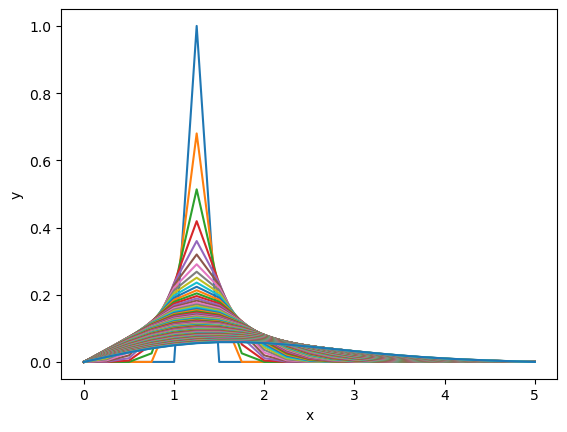
Let us try with an initial peak somewhere in the middle.
Lx = 5 # length
N = 20 # division in space
x = np.linspace(0, Lx, N+1) # positions
y0 = np.zeros_like(x) # initial condition
y0[5] = 1 # 1 at left end
D = 0.1 # diffusion constant
dt = 0.1 # time step
ts = 10. # time for solution
y = euler(diff1D, y0, dt, int(ts/dt), (x, D))
# spatial pattern at different time
plt.plot(x, y.T)
plt.xlabel("x"); plt.ylabel("y");
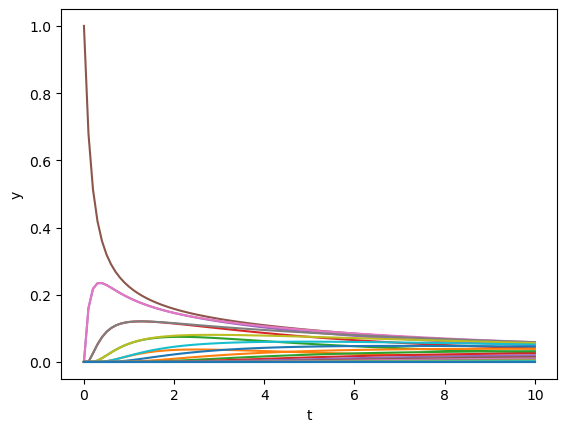
# evolution of each point in time
t = np.arange(0,ts+dt,dt)
plt.plot(t,y)
plt.xlabel("t"); plt.ylabel("y");
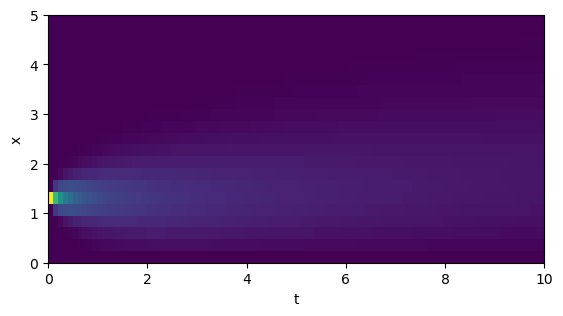
# plot in space and time
plt.imshow(y.T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");
The accuracy of solution depends on the fineness of discretization in space and time.
Let us try a finer spatial division.
N = 40 # discretization in space
x = np.linspace(0, Lx, N+1)
y0 = np.zeros_like(x) # initial condition
y0[10] = 1 # initial peak at x=10/50
y = euler(diff1D, y0, dt, int(ts/dt), (x, D))
# evolution of spatial pattern
plt.plot(x, y.T)
plt.xlabel("x"); plt.ylabel("y");
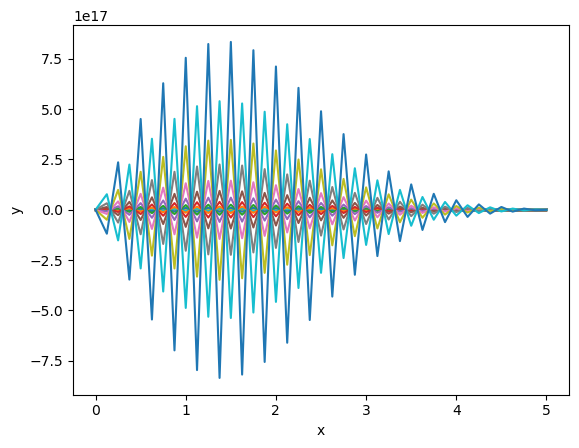
In the diffusion equation, peaks are pulled down and dips are pushed up, and that can cause spatial instability if the time step is too large.
# plot in space and time
plt.imshow(y[:10].T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");
Stability#
For an accurate solution, \(\Delta x\) have to be small. But making \(\Delta x\) small can make the ODE stiff such that solution can be unstable.
It is known that stable solution by Euler method requires
In the above example, \(\Delta t=0.1\) was over the limit:
(Lx/N)**2/(2*D)
0.078125
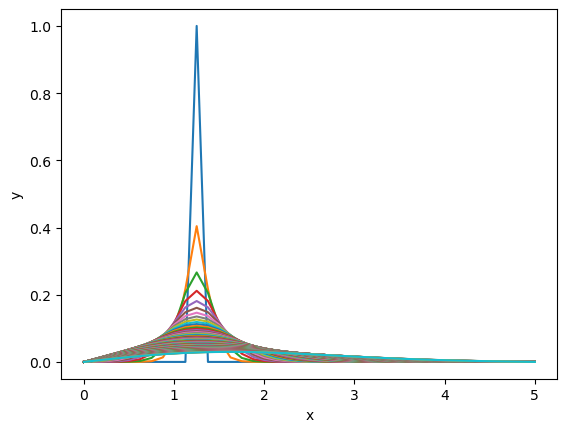
By odeint#
The above stability issue can be worked around by using an ODE library that implements automatic time step adaptation, such as odeint.
from scipy.integrate import odeint
Lx = 5 # length
N = 40
x = np.linspace(0, Lx, N+1)
y0 = np.zeros_like(x) # initial condition
y0[10] = 1
D = 0.1 # diffusion constant
dt = 0.1
ts = 10
t = np.arange(0, ts, dt)
y = odeint(diff1D, y0, t, (x, D))
# evolution of spatial pattern
p = plt.plot(x, y.T)
plt.xlabel("x"); plt.ylabel("y");
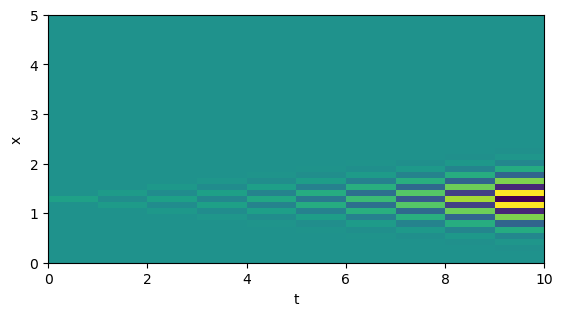
Let us see the case with an input.
def pulse(y, x, t):
"""1 for 1<x<2 at 1<t<2"""
return (1<x)*(x<2)*(1<t)*(t<2)*1.
N = 40
x = np.linspace(0, Lx, N+1)
y0 = np.zeros_like(x) # initial condition
t = np.arange(0, ts, dt)
y = odeint(diff1D, y0, t, (x, D, pulse))
# plot in space and time
plt.imshow(y.T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");
3D plot and animation#
For more intuitive visualization of the space-time dynamics, you may want to use 3D plot or animation.
# uncomment the line below for interactive graphics
#%matplotlib widget
# plot in 3D
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
T, X = np.meshgrid(t, x)
ax.plot_surface(T, X, y[:,:N+1].T, cmap='viridis')
plt.xlabel("t"); plt.ylabel("x");
from matplotlib import animation
fig = plt.figure()
frames = [] # prepare frame
for i, ti in enumerate(t):
p = plt.plot(x, y[i], 'b')
plt.xlabel("x"); plt.ylabel("y");
frames.append(p)
anim = animation.ArtistAnimation(fig, frames, interval = 10)
#%matplotlib inline
Boundary Conditions#
As briefly mentioned above, there are two typical ways of specifying the boundary condition:
Dirichlet boundary condition: the value \(y(x_0,t)=y_0\) or \(y(x_N,t)=y_N\)
concentration at an open end of a tube to a water bath.
voltage of an electric cable attached to the ground or a strong battery.
Neumann boundary condition: the derivative \(\left.\frac{\partial y(x,t)}{\partial x}\right|_{x_0}=y'_0\) or \(\left.\frac{\partial y(x,t)}{\partial x}\right|_{x_N}=y'_N\)
concentration at a closed end of a tube (no molecular flow).
voltage at a dead end of an electric cable.
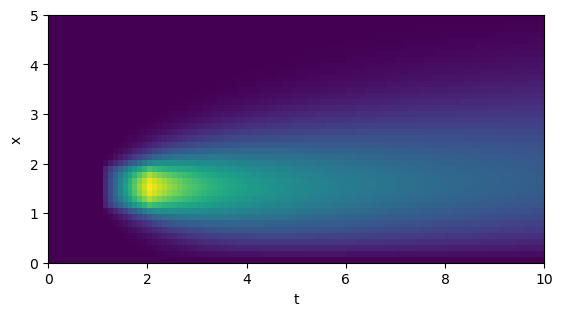
We already implemented Dirichlet boundary condition in diff1D().
Let us implement a Neumann boundary condition at the right end \(\left.\frac{\partial y(x,t)}{\partial x}\right|_{x_N}=0\) and see the difference.
A simple way is to use a one-sided differentiation
which reduces to \(y_{N+1}=y_{N}\) and
A better way is to use a symmetric differentiation
which reduces to \(y_{N+1}=y_{N-1}\) and
def diff1DN(y, t, x, D, inp=None):
"""1D Diffusion equaiton with boundary conditions
y_0=0 on the left and dy/dx|x_N=0 on the right end.
y: state vector
t: time
x: positions
D: diffusion coefficient
input: function(y,x,t)"""
# spatial step
dx = x[1] - x[0]
# shift array to left and right
d2ydx2 = (y[:-2] -2*y[1:-1] + y[2:])/dx**2
# Dirichlet on the left, Neumann on the right end
d2ydx2 = np.hstack((0, d2ydx2, 2*(y[-2] - y[-1])/dx**2))
if inp == None:
return(D*d2ydx2)
else:
return(D*d2ydx2 + inp(y, x, t))
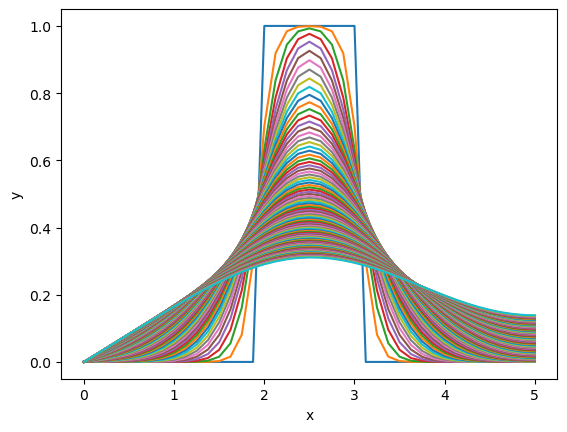
For example, from the initial bump in the center, the spreads to both sides are quite different.
N = 40
x = np.linspace(0, Lx, N+1)
y0 = np.zeros_like(x) # initial condition
y0[16:25] = 1
ts = 10
t = np.arange(0, ts, dt)
y = odeint(diff1DN, y0, t, (x, D))
# evolution of spatial pattern
plt.plot(x, y.T)
plt.xlabel("x"); plt.ylabel("y");
Wave Equation#
PDE with a second-order dynamics can represent traveling waves. The wave equation has the standard form
where \(c\) is the wave speed and \(d\) is the decay rate.
We convert the second-order system to a set of first order systems by consiering a vector \(y=(u,v)\) representing the amplitude \(u\) and its change rate \(v\):
def wave1D(y, t, x, c, d, inp=None):
"""1D wave equaiton with constant boundary
y: state vector hstack(u, v)
t: time
x: positions
c: wave speed
input: function(y,x,t)"""
n = int(len(y)/2)
u, v = y[:n], y[n:]
dx = x[1] - x[0]
# finite different approximation
d2udx2 = (u[:-2] -2*u[1:-1] + u[2:])/dx**2
d2udx2 = np.hstack((0, d2udx2, 0)) # add 0 to both ends
if inp == None:
return np.hstack((v, c**2*d2udx2 - d*v))
else:
return np.hstack((v, c**2*d2udx2 - d*v + inp(y, x, t)))
Lx = 10
N = 100
x = np.linspace(0, Lx, N+1)
c = 1. # wave speed
d = 0.1
ts = 30
dt = 0.1
t = np.arange(0, ts, dt)
y0 = np.zeros(2*(N+1)) # initial condition
#y0[20:40] = 1
#y = odeint(wave1D, y0, t, (x, c, d))
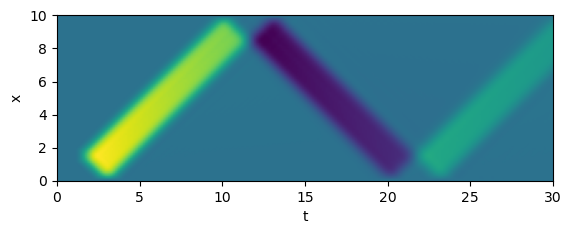
y = odeint(wave1D, y0, t, (x, c, d, pulse))
# plot in space and time
# show only first dimension
plt.imshow(y[:,:N+1].T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");
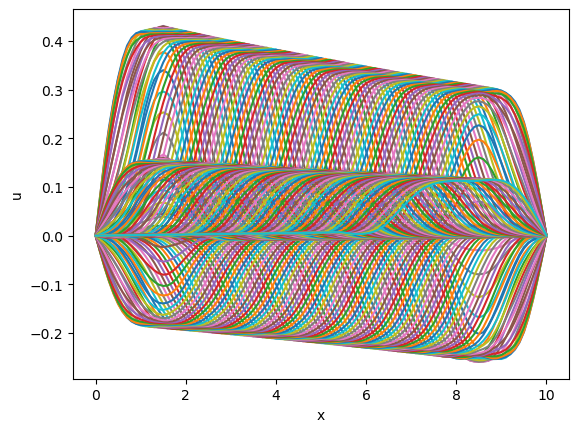
#evolution in spatial pattern
plt.plot(x, y[:,:N+1].T) # only first dimension
plt.xlabel("x"); plt.ylabel("u");
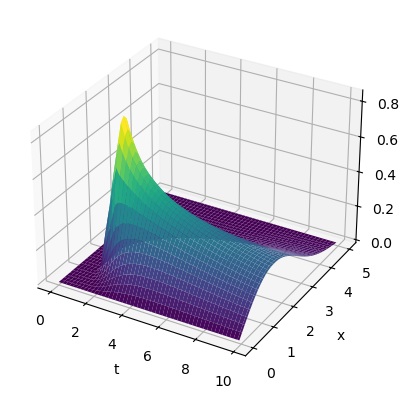
# plot in 3D
fig = plt.figure(figsize=(8, 8))
ax = fig.add_subplot(projection='3d')
T, X = np.meshgrid(t, x)
ax.plot_surface(T, X, y[:,:N+1].T, cmap='viridis')
plt.xlabel("t"); plt.ylabel("x");
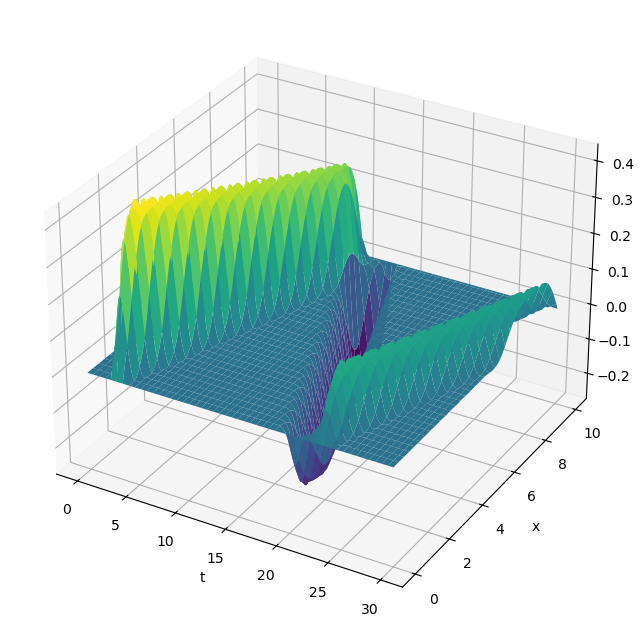
fig = plt.figure()
frames = [] # prepare frame
for i, ti in enumerate(t):
p = plt.plot(x, y[i,:N+1])
plt.xlabel("x"); plt.ylabel("y");
frames.append(p)
anim = animation.ArtistAnimation(fig, frames, interval = 10)
Reaction-Diffusion Equation#
Linear waves can decay, reflect, and overlay.
Some nonlinear waves, like neural spike, can travel without decaying.
FitzHugh-Nagumo model can be embedded in a diffusive axon model
def fhnaxon(y, t, x, inp=0, D=1, a=0.7, b=0.8, phi=0.08):
"""FitzHugh-Nagumo axon model
y: state vector hstack(v, w)
t: time
x: positions
I: input current
D: diffusion coefficient
"""
n = int(len(y)/2)
v, w = y[:n], y[n:]
# finite difference approximation
d2vdx2 = (v[:-2] -2*v[1:-1] + v[2:])/(x[1] - x[0])**2
d2vdx2 = np.hstack((0, d2vdx2, 0)) # add 0 to both ends
I = inp(y,x,t) if callable(inp) else inp # function or constant
dvdt = v - v**3/3 - w + D*d2vdx2 + I
dwdt = phi*(v + a -b*w)
return(np.hstack((dvdt, dwdt)))
def pulse2(y, x, t):
"""1 for 5<x<10 at 5<t<10"""
return (5<x)*(x<10)*(5<t)*(t<10)
Lx = 30
N = 100
x = np.linspace(0, Lx, N+1)
y0 = np.zeros(2*(N+1)) # initial condition
y0[0:N+1] = -1.2 # initialize near the resting state
ts = 50
dt = 0.5
t = np.arange(0, ts, dt)
y = odeint(fhnaxon, y0, t, (x, pulse2))
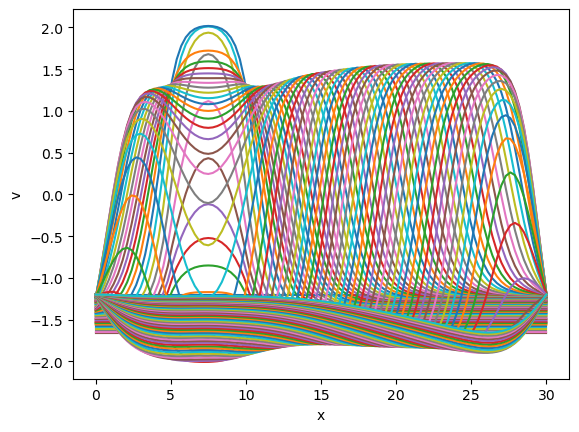
# evolution of spatial pattern in time
p = plt.plot(x, y[:,:N+1].T) # plot in space
plt.xlabel("x"); plt.ylabel("v");
# in space and time
plt.imshow(y[:,:N+1].T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");

#%matplotlib widget
# plot in 3D
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
T, X = np.meshgrid(t, x)
ax.plot_surface(T, X, y[:,:N+1].T, cmap='viridis')
plt.xlabel("t"); plt.ylabel("x");
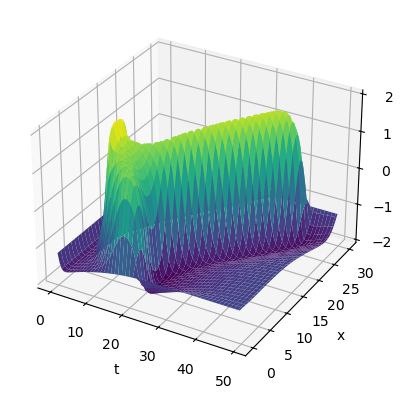
fig = plt.figure()
frames = [] # prepare frame
for i, ti in enumerate(t):
p = plt.plot(x, y[i,:N+1])
plt.xlabel("x"); plt.ylabel("y");
frames.append(p)
anim = animation.ArtistAnimation(fig, frames, interval = 10)
Cyclic Boundary Condition#
A practical way to approximate an infinitely large space without the effect of boundaries is to use the cyclic or periodic boundary condition, in which both ends of the space is assumed to be connected, like a ring, torus, etc.
You can use np.roll function to shift the contents of an array as a ring.
def fhnaxon_cb(y, t, x, inp=0, D=1, a=0.7, b=0.8, phi=0.08):
"""FitzHugh-Nagumo axon model
y: state vector hstack(v, w)
t: time
x: positions
I: input current
D: diffusion coefficient
"""
n = int(len(y)/2)
v, w = y[:n], y[n:]
# cyclic boundary condition
d2vdx2 = (np.roll(v,-1) -2*v + np.roll(v,1))/(x[1] - x[0])**2
# If inp is a function, call it with arguments. Otherwise take it as a constant
I = inp(y,x,t) if callable(inp) else inp
dvdt = v - v**3/3 - w + D*d2vdx2 + I
dwdt = phi*(v + a -b*w)
return(np.hstack((dvdt, dwdt)))
y = odeint(fhnaxon_cb, y0, t, (x, pulse2))
# in space and time
plt.imshow(y[:,:N+1].T, origin='lower', extent=(0, ts, 0, Lx))
plt.xlabel("t"); plt.ylabel("x");
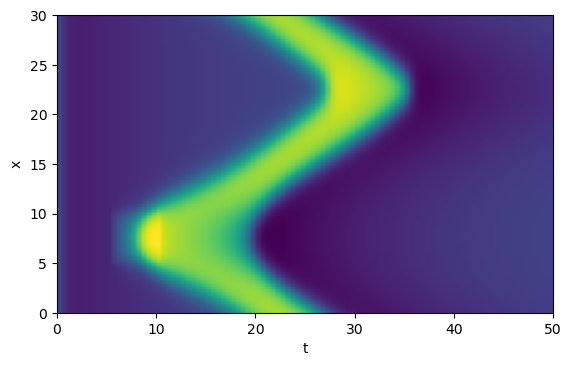
In this example, the propagate in both directions and the one left at the bottom reappears from the top. Then the two spikes collide and disappear.
PDE in 2D space#
We can also model dynamics in two or higher dimension spate.
The diffusion equation of a variable \(y(x_1,x_2,t)\) in the 2D space is given by:
Using the Laplace operator (or Laplacian):
the diffusion equation is represented as
Diffusion equation in 2D space#
Like the case in 1D space, we discretize the space in a 2D grid, and covert the PDF to ODE.
def diff2D(y, t, x, D, inp=0):
"""1D Diffusion equaiton with constant boundary condition
y: states at (x0, x1)
t: time
x: positions (x0, x1) in meshgrid format
D: diffusion coefficient
inp: function(y,x,t) or number"""
n = np.array(x).shape[1:] # grid size (n0, n1)
nn = n[0]*n[1] # grid points n0*n1
y = y.reshape(n) # linear to 2D
dx = [x[0,0,1]-x[0,0,0], x[1,1,0]-x[1,0,0]] # space step
# Laplacian with cyclic boundary condition
Ly = (np.roll(y,-1,0)+np.roll(y,1,0)-2*y)/dx[0]**2 + (np.roll(y,-1,1)+np.roll(y,1,1)-2*y)/dx[1]**2
# fix the boundaris to 0 for Dirichlet condition
Ly[0,:] = Ly[-1,:] = Ly[:,0] = Ly[:,-1] = 0
dydt = D*Ly + (inp(y,x,t) if callable(inp) else inp)
return dydt.ravel()
L = 5
N = 20
x = np.array(np.meshgrid(np.linspace(0,L,N), np.linspace(0,L,N)))
ts = 10
dt = 0.1
t = np.arange(0, ts, dt)
D = 0.1
y0 = np.zeros((N,N)) # initial condition
y0[5:10,10:15] = 1 # initial bump
y = odeint(diff2D, y0.ravel(), t, (x, D))
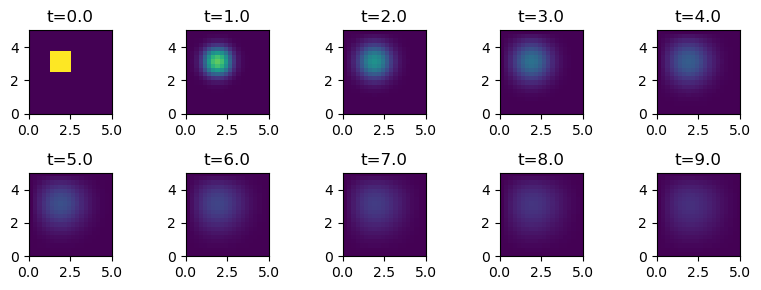
plt.figure(figsize=(8,3))
for i in range(10):
plt.subplot(2, 5, i+1)
plt.imshow(y[10*i].reshape(N,N).T, vmin=0, vmax=1, origin='lower', extent=(0,L,0,L))
plt.title('t={:1.1f}'.format(t[10*i]))
plt.tight_layout()
# animation
fig = plt.figure()
frames = [] # prepare frame
for i, ti in enumerate(t):
p = plt.imshow(y[i].reshape(N,N).T, vmin=0, vmax=1, origin='lower', extent=(0,L,0,L))
frames.append([p])
anim = animation.ArtistAnimation(fig, frames, interval = 10)
plt.xlabel("x1"); plt.ylabel("x2");
PDE libraries#
Solution of PDE is computationally intensive, especially in 2D or higher dimensional space. For practical computation, it is better to use specialized libraries for solving PDEs, such as:
py-pde: https://py-pde.readthedocs.io
FEniCS: https://fenicsproject.org